Unterwasserfahrzeuge und -geräteträger sind essenzielle Werkzeuge in der maritimen Technologie. Es wird zwischen bemannten und unbemannten Systemen unterschieden, wobei der Trend klar zu unbemannten Lösungen geht, um Kosten zu senken, die Effizienz zu steigern und die Sicherheit zu erhöhen.
Kabelgebundene Fahrzeuge, bekannt als Remotely Operated Vehicles (ROVs), werden häufig für Inspektionsaufgaben und schwere Unterwasserarbeiten eingesetzt, wie das Verlegen von Kabeln oder den Unterwasserbergbau. Diese Systeme erfordern jedoch die ständige Unterstützung von Schiffen für Energieversorgung und Steuerung.
Im Gegensatz dazu operieren autonome Unterwasserfahrzeuge (Autonomous Underwater Vehicles, AUVs) ohne direkte Verbindung zur Oberfläche. Sie eignen sich hervorragend für die Erkundung großer Meeresgebiete und kontinuierliche Überwachungsaufgaben. Herausforderungen bestehen hier insbesondere in der Energieversorgung, der präzisen Positionsbestimmung und der zuverlässigen Kommunikation unter Wasser.

Prof. Dr.-Ing.
Sascha Kosleck
Universität Rostock, Lehrstuhl für Meerestechnik (URO-LMT)
Oskar-Kellner-Institut (OKI) / Raum 104
Justus-von-Liebig-Weg 2
18059 Rostock
+49 381 498 9230
per E-Mail kontaktieren
Louis Fotiadi
Universität Rostock

Johannes Hopf
EvoLogics

Martin Kurowski
Universität Rostock
Die maritime Industrie steht vor einer wachsenden Nachfrage nach innovativen autonomen Unterwasserlösungen. Die Erkenntnisse aus der ersten Förderphase des Ocean Technology Campus zeigen, dass der Einsatz autonomer Unterwasserfahrzeuge (AUVs) und intelligenter Sensorsysteme essenziell für die nachhaltige Nutzung und Überwachung der Ozeane ist. Aufbauend auf den abgeschlossenen Projekten der ersten Phase wird in der zweiten Phase gezielt an Lösungen gearbeitet, die eine höhere Effizienz, Autonomie und Interoperabilität ermöglichen.
Ein zentraler Fokus liegt auf autonomen Fahrzeugverbünden, die in der Lage sind, komplexe Missionen unabhängig durchzuführen. Das Projekt OTC-Base2Swarm entwickelt hierzu ein offenes Kommunikationsnetzwerk für verschiedene Fahrzeugtypen, das eine effiziente Koordination und Steuerung ermöglicht. Diese Technologie wird eine Schlüsselrolle bei der Wartung von Offshore-Windparks, der Inspektion maritimer Infrastruktur und der wissenschaftlichen Meeresforschung spielen.
Ein weiteres Zukunftsfeld ist das Monitoring von Unterwasserkabeln und Infrastruktur. Mit dem zunehmenden Ausbau der Offshore-Windenergie steigt der Bedarf an innovativen Überwachungssystemen, die autonom arbeiten und Schäden frühzeitig erkennen. OTC-SMOC2DYN setzt hier an und entwickelt datenbasierte Simulationsmodelle, die zur Verlängerung der Wartungsintervalle und zur nachhaltigen Instandhaltung von Seekabeln beitragen.
Zusätzlich wird intensiv an der Reduktion von Unterwasserlärm geforscht. Maritime Lärmemissionen beeinträchtigen das marine Ökosystem erheblich. Die zweite Förderphase setzt auf die Entwicklung neuer Methoden zur aktiven Schallreduktion, die insbesondere bei elektrischen Antrieben und autonomen Unterwasserfahrzeugen zum Einsatz kommen sollen.
Die Entwicklungen der zweiten Phase adressieren zentrale Herausforderungen der maritimen Industrie und bieten Unternehmen und Forschungseinrichtungen neue Marktchancen in der Offshore-Windenergie, der marinen Infrastrukturüberwachung und der autonomen Unterwasserrobotik. Durch die enge Zusammenarbeit mit Industriepartnern und internationalen Clustern wird sichergestellt, dass die entwickelten Technologien schnell in reale Anwendungen überführt werden können.

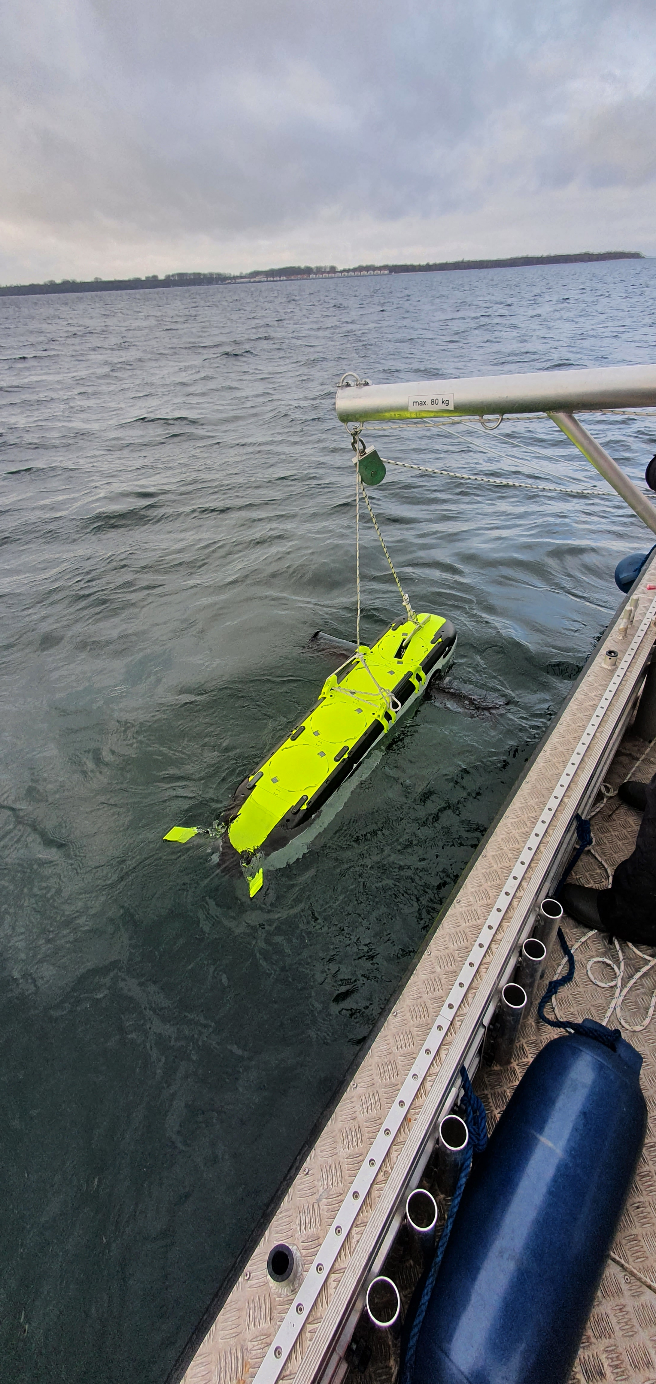
Unterwasserroboter sind in der maritimen Industrie längst unverzichtbar. Sie inspizieren Pipelines, überwachen Offshore-Windparks und sammeln Daten für die Meeresforschung. Doch bislang agieren sie meist isoliert. OTC-Base2Swarm setzt genau hier an: Das Projekt entwickelt eine neue Generation von autonomen Fahrzeugverbünden, die gemeinsam komplexe Aufgaben übernehmen können – ohne menschliches Eingreifen und mit minimalem Energieaufwand.
Eine der größten Herausforderungen in der Unterwasserrobotik ist die zuverlässige Kommunikation. Während an Land Mobilfunk und GPS jederzeit verfügbar sind, müssen Unterwasserfahrzeuge mit akustischen, optischen oder speziellen Funktechnologien arbeiten – oft mit begrenzter Reichweite und Geschwindigkeit. OTC-Base2Swarm erforscht, wie ein intelligentes, sich selbst organisierendes Netzwerk entstehen kann, das Informationen in Echtzeit austauscht und Fahrzeuge optimal koordiniert.
Die Vision: Eine Flotte von autonomen Robotern, die sich flexibel auf ihre Umgebung einstellen, sich gegenseitig unterstützen und Daten effizient teilen. So könnten in Zukunft zum Beispiel großflächige Inspektionen von Offshore-Windparks ohne den Einsatz großer Spezialschiffe erfolgen – ein enormer Fortschritt für Effizienz und Nachhaltigkeit.
Von der Wartung maritimer Infrastruktur über den Umweltschutz bis hin zur Meeresforschung: Autonome Schwärme werden eine Schlüsselrolle in vielen Bereichen spielen. OTC-Base2Swarm leistet hier Pionierarbeit und entwickelt Technologien, die den Weg für neue Anwendungen ebnen – für eine sicherere, effizientere und nachhaltigere Nutzung der Meere.
M.Sc.
Louis Rautmann
Projektkoordinator
Universität Rostock, Lehrstuhl für Meerestechnik (URO-LMT)
+49 381 498 9245
per E-Mail kontaktieren

Dr.-Ing.
Patrick Mutschler
Projektkoordinator
Universität Rostock, Lehrstuhl für Strukturmechanik
per E-Mail kontaktieren
Unsere moderne Welt ist ohne Unterwasserkabel nicht denkbar: Sie transportieren riesige Datenmengen zwischen Kontinenten, versorgen Offshore-Windparks mit Strom und sichern die Infrastruktur von Öl- und Gasplattformen. Doch sie sind extremen Bedingungen ausgesetzt – von starker Strömung über Materialermüdung bis hin zu Schäden durch Anker oder Meereslebewesen. Eine zuverlässige Überwachung ist daher unerlässlich.
OTC-SMOC2DYN entwickelt eine neue Generation von digitalen Werkzeugen, um den Zustand von Unterwasserkabeln präzise zu überwachen und Schäden frühzeitig zu erkennen. Das Besondere: Statt regelmäßiger, kostenintensiver Wartungseinsätze setzt das Projekt auf eine Kombination aus Sensorik, Künstlicher Intelligenz (KI) und dynamischer Simulation.
Die Innovationen von OTC-SMOC2DYN bedeuten einen Paradigmenwechsel in der Überwachung maritimer Infrastruktur. Betreiber von Offshore-Windparks und Kommunikationsnetzwerken können Wartungskosten senken, Ausfälle vermeiden und ihre Systeme effizienter betreiben. Gleichzeitig leistet das Projekt einen wichtigen Beitrag zum Schutz der Meeresumwelt, da unnötige Eingriffe und Reparatureinsätze minimiert werden.
Mit den Technologien von OTC-SMOC2DYN entsteht eine neue Generation von autonomen, intelligenten Überwachungssystemen, die nicht nur die Lebensdauer von Unterwasserkabeln verlängern, sondern auch die Sicherheit und Nachhaltigkeit der gesamten Offshore-Industrie verbessern.