Subsea vehicles and equipment carriers are in many respects established technologies. A distinction is made between manned and unmanned vehicles. The trend towards more and more unmanned UW systems aims at enormous cost and time savings as well as a significant increase in work safety. In these systems, a distinction is made between wired and autonomous vehicles. The cable-connected vehicles, also called Remotely Operated Vehicles (ROV), are regularly used today for inspection, but also for performing heavy work underwater, e.g., for laying underwater cables (trencher) and in underwater mining (crawler). However, due to the cable connection, it is necessary to accompany the operations with a vessel that handles the deployment and recovery of the ROV as well as its power supply and control. For the exploration of large sea areas, for permanent monitoring tasks, but also to further open weather windows for offshore work, autonomous underwater vehicles (AUV, in particular also gliders, drifters, etc.) are increasingly used. The biggest challenges here are energy supply, positioning and communication.

Prof. Dr.-Ing.
Sascha Kosleck
Universität Rostock, Lehrstuhl für Meerestechnik (URO-LMT)
Oskar-Kellner-Institut (OKI) / Raum 104
Justus-von-Liebig-Weg 2
18059 Rostock
+49 381 498 9230
contact by e-mail
The goal of OTC-BASE, one of the developed flagship projects, is to overcome this challenge. If it were possible to supply AUVs with sufficient energy, communicate with them over long distances and determine their position at the same time, this would not only significantly simplify the exploration of the underwater world with the help of autonomous vehicles, but also accelerate it considerably. In addition, it is necessary to improve the efficiency of the propulsion systems, as in OTC-Thruster, and to minimize energy consumption through suitable locomotion concepts, as in OTC-FlyingARGO. In addition to the technical challenges, there are currently still severe limitations with regard to documentation and accessibility of already existing systems. This is mainly driven by economic factors. As a result, the very expensive systems of different manufacturers can hardly be combined with each other. The definition of standards often fails due to the large number of players. In order to achieve an improvement here, open innovation and open-source approaches can contribute to advancing developments on a broad basis that are independent of manufacturers and systems and can thus find their way into commercial exploitation more quickly.
UW Mobility & Autonomy requires strong knowledge in the fields of marine and ocean engineering, design, structural mechanics, fluid mechanics, propulsion and power engineering, sensor technology, UW communication technology, computer science as well as control engineering and robotics. Especially through the participating chairs of the University of Rostock, as well as complementary competences of the research group Smart Ocean Technologies, these competences are contributed in the required breadth and depth. In addition, the scientists can draw on established relationships with various regional companies, through which they are already cooperating with joint projects.
In medium and long term, the trend is towards autonomously operating swarms that organize themselves, supply themselves, communicate internally and externally, and thus carry out exploration, monitoring and maintenance missions autonomously. In OTC-BASE, the testing infrastructure is being created so that such systems can be developed later. In order to realize these autonomous systems, an underwater positioning system is required, analogous to GPS on land, which, in contrast to GPS, must be set up distributed over different platforms in order to achieve a large spatial coverage. In this context, securing the energy supply for the systems is a fundamental development task. In this context, the development of new systems is crucial not only for the conversion, but above all for the storage and transmission of energy. The battery market for autonomous underwater vehicles is experiencing steady annual growth. For regions far from any grid infrastructure, different methods of energy harvesting (chemical and/or biological processes, current and wave energy) are to be considered, which are adapted to local conditions. Smart systems for energy management, as well as real-time modeling of future available and required energy quantities, are essential for this and of great economic importance. With the OTC-BASE project, important technological foundations are being laid to enable technologies to be tested and optimized underwater much more quickly and effectively in the future.

With OTC-Base we will provide the technological basis for newly developed subsea technologies. We are creating an infrastructure that will enable new innovative developments in the subsea sector to be tested quickly and easily and integrated into existing systems. To this end, we are setting new standards that are capable of interconnecting a wide range of marine technology systems and at the same time provide enough space for innovative approaches. Further information is available here.
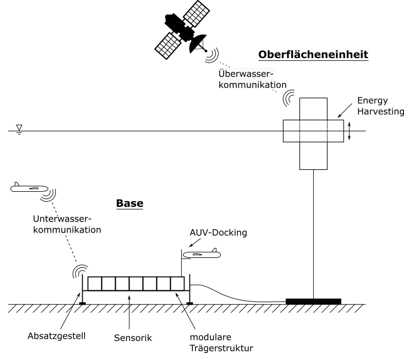
OTC-BASE represents the technological basis for all development projects planned within the framework of the Ocean Technology Campus Rostock. Both methodological and technological developments are to be given equal consideration within OTC-BASE. The goal is to provide a physical development environment for targeted research on underwater technologies that will enable largely autonomous exploration of the marine environment in the future. OTC-BASE creates the possibility within the cluster to test new technologies and systems in an uncomplicated way and much faster than before under real conditions, e.g., at the Digital Ocean Lab (DOL). In its first approach, the project represents a modular infrastructure installed on the seafloor, which will be supplemented by mobile systems in later development stages. With OTC-BASE, previously missing bridge technologies for underwater applications are being developed and accompanied to pre-industrial product maturity.
M.Sc.
Louis Rautmann
Projektkoordinator
Universität Rostock, Lehrstuhl für Meerestechnik (URO-LMT)
+49 381 498 9245
contact by e-mail
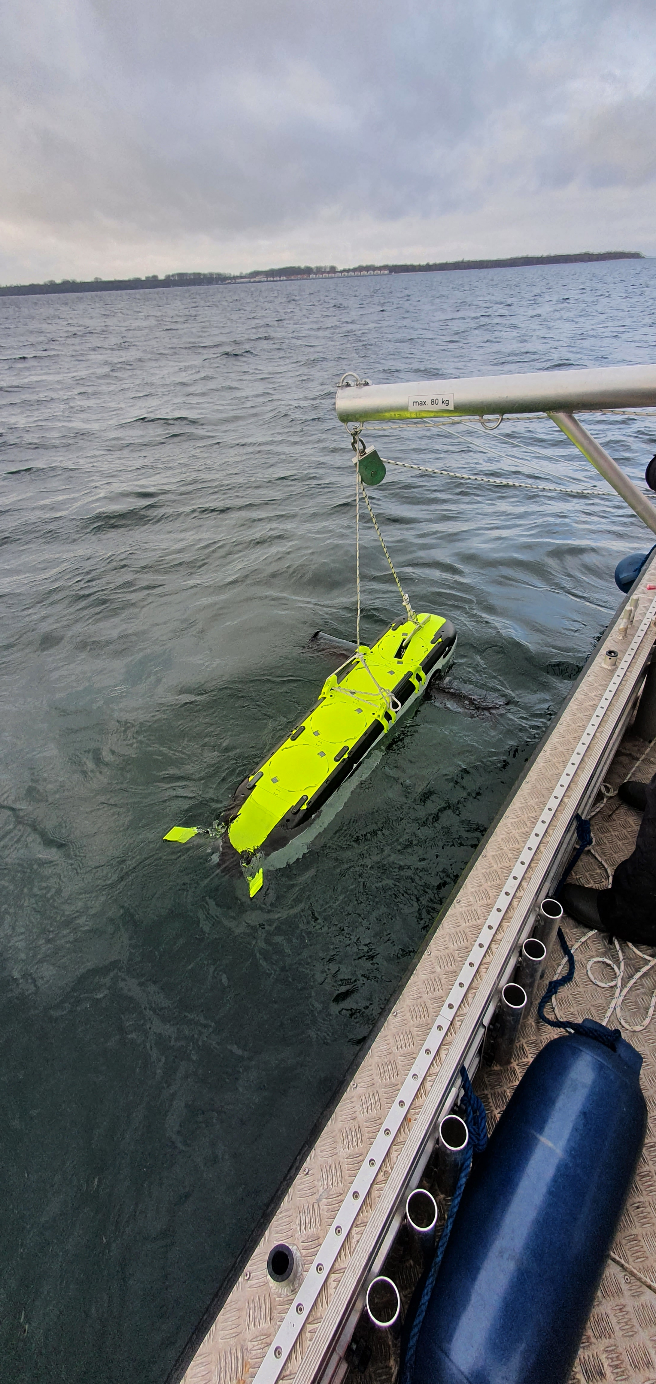
Due to the advancing climate change, the monitoring of physical as well as increasingly chemical and biological parameters in the oceans is steadily gaining in importance. In an open innovation process, a novel "flapping-foil" underwater glider will be developed to serve as an augmenting tool to existing global ocean monitoring networks. The underwater glider will be largely modular and pressure-neutral. In its final stage of development, it will be superior to today's gliders in terms of speed, attainable diving depth and manageability. This will be achieved, among other things, by the novel glide concept, which, in conjunction with an intelligent, self-adjusting navigation and control system, will enable autonomous adaptation to variable environmental conditions. These innovations make the vehicle efficient and quick to deploy, even from the air. This opens up further markets in the field of small-scale tasks such as monitoring and tracking of algae blooms, oil-spill response and hurricane monitoring, which require a measuring vehicle to be deployed on site within a very short time.
ROV's as well as AUV's are used as carrier platforms for highly sensitive hydroacoustic sensor systems and also use them for their own position and attitude control. Electrically driven propellers (thrusters) are used as propulsion systems. The problem is that structural vibrations are introduced into the ROV or AUV by the propulsion system, which can lead to a radiation of hydro-sound and cause disturbances in the applied sensor systems. The main sources for this are the electrical drive of the thruster itself or its power electronics and the drive propeller. Within the overall project, a modular and scalable platform for hubless thruster systems (MSTP) up to initially approx. 30 kW is to be developed. A particularly low-vibration and quiet operating behavior, high hydrodynamic efficiency as well as modularity are the main focus. ROVs and AUVs operate partly in the deep sea, so that all electrical and mechanical components must be designed to be pressure-neutral. Especially for the components of the required power electronics, it must be ensured that they meet this requirement. To date, there has been little research and little available knowledge in this area, which will be remedied by this collaborative project. In strategic medium-term planning, the availability of an MSTP with the required properties will enable KPG to offer low-vibration and quiet thruster systems for different applications and customer requirements much more flexibly than before. In the longer-term strategic planning, after the construction and testing of the first MSTP prototypes, the commercial and worldwide marketing of these, as well as the expansion of the MSTP product portfolio, is planned.

Dr.-Ing.
Matthias Witte
Projektleitung
Universität Rostock, Fakultät für Maschinenbau und Schiffstechnik, Lehrstuhl Strömungsmaschinen (URO-ITU)
+49 381 498 9046
contact by e-mail

The application of the energy supply system is envisaged for instrument technology in the offshore industry, marine research technology, environmental monitoring and, in the short and medium term, in inland and coastal shipping. It should also allow new types of instruments with relatively high-power consumption to be operated reliably over longer periods at low cost and in a much more resource-efficient manner than with batteries. Battery systems currently still have very low gravimetric energy densities (< 200 Whel/kg) and volumetric energy densities (< 300 Whel/l). Accordingly, heavy and voluminous battery modules must be used in the underwater devices for long-term operations. In contrast, gravimetric energy densities of up to 850 Whel/kg and 500 Whel/l can be achieved with fuel cell systems.
The aim of this study is to establish processes and methods based on the submarine for the maintenance of offshore wind turbines developed by Neptun Ship Design GmbH (NSD) from Rostock as part of the BMBF joint project Offshore Wind Solutions MV. The aim of the project was to integrate a submarine within the framework of an offshore wind farm service concept and to introduce it later as a product in the offshore wind market. In OTC-Sub, an exploitation concept is to be developed, in which further application scenarios and business models for this type of underwater vehicle are to be worked out, and a consortium based at the Ocean Technology Campus is to be put together for the construction of the vehicle. Furthermore, it will be examined whether - and if so, with which adaptations - the vehicle can be a useful addition to the Digital Ocean Lab (DOL) of the Ocean Technology Campus. Drive units (thrusters), energy storage (batteries, fuel cells, …) as well as novel measurement procedures, communication methods, sensors, energy transfer systems, etc. can be tested at a very early stage without already having underwater-suitable and small electronics (with the laptop into the submarine).